硬件開發(fā)工資高嗎重慶排名seo公司
第 1 章 概述
? 技術(shù)特點(diǎn)
? 支持標(biāo)準(zhǔn) 100M/s 帶寬全雙工 EtherCAT 總線網(wǎng)絡(luò)接口及 CoE 通信協(xié)議一
進(jìn)一出(RJ45 接口),支持多組動(dòng)態(tài) PDO 分組和對(duì)象字典的自動(dòng)映射,支持站
號(hào) ID 的自動(dòng)設(shè)置與保存,支持 SDO 的電機(jī)參數(shù)設(shè)置與自動(dòng)保存。
? 自動(dòng)適配市面上 EtherCAT 總線主站系統(tǒng)或 PLC 運(yùn)動(dòng)控制器,如
TwinCAT,Codesys,歐姆龍,Trio,SOEM,IGH,Acontis,KPA 等。
? 支持標(biāo)準(zhǔn) CIA DS402 協(xié)議,內(nèi)置同步周期位置(CSP 模式)、回零控制模
式(Homing 模式)。
? 支持最多驅(qū)動(dòng) 4 路步進(jìn)電機(jī),實(shí)現(xiàn)多軸同步實(shí)時(shí)控制,具有最高性價(jià)比。
? 內(nèi)置 12 路 5V 或 24V IO 數(shù)字信號(hào)輸入,采用雙向光耦,支持 NPN 和 PNP
型,用于普通的數(shù)字 IO 采集或者左、中、右限位和回零參考功能(13pin-免螺
絲快速接線端子 KFM736L-5.0)。
? 內(nèi)置 8 路數(shù)字信號(hào)輸出,用于普通的數(shù)字 IO 輸出或者抱閘和到位功能,單
路可驅(qū)動(dòng) 500mA 電流(10pin-免螺絲快速接線端子 KFM736L-5.0)。
? 低速運(yùn)行靜音,振動(dòng)小。
? 中速運(yùn)行穩(wěn)定,驅(qū)動(dòng)能力強(qiáng)。
? 高速運(yùn)行平滑,動(dòng)態(tài)響應(yīng)好。
? 矢量 FOC 控制技術(shù),電流效能高。
? 用戶可自定義細(xì)分(默認(rèn) 256 細(xì)分,51200 個(gè)脈沖/圈)。
? 用戶可自定義電機(jī)上使能的保持電流和運(yùn)行過程中的運(yùn)行電流。
? 缺相保護(hù)、過流保護(hù)、過壓保護(hù)、過溫保護(hù),電源防反接保護(hù)。
第 2 章 技術(shù)參數(shù)
EtherCAT_Step_Motor_V1.0,四軸步進(jìn)電機(jī)驅(qū)動(dòng)器,單軸驅(qū)動(dòng)最大電流 3A。
可以配合 28/42/57 步進(jìn)電機(jī)一起使用。
工作轉(zhuǎn)速最好在 1200 轉(zhuǎn)/分以內(nèi),因?yàn)椴竭M(jìn)電機(jī)隨著轉(zhuǎn)速的提高力矩減小,
在 300 轉(zhuǎn)/分鐘以內(nèi)驅(qū)動(dòng) 42/57 步進(jìn)電機(jī)可以達(dá)到額定力矩,絕對(duì)靜音。900 轉(zhuǎn)/
分以上時(shí),電機(jī)基本上處于空載狀態(tài)。使用過程中注意驅(qū)動(dòng)器散熱。EtherCAT
總線的 DC 通訊周期可以達(dá)到 125us,支持回零模式,循環(huán)同步位置模式。
帶步進(jìn)電機(jī)加減速最大 500 轉(zhuǎn)/s2,最高速度 3000 轉(zhuǎn)/min,最低轉(zhuǎn)速 0.001
轉(zhuǎn)/分。
數(shù)字輸入支持 NPN 和 PNP 觸發(fā),數(shù)字輸出最大電流可以達(dá)到 0.5A。
建議驅(qū)動(dòng)器的供電電源電壓 24V,直流電源有 15A 以上的輸出能力,保證驅(qū)
動(dòng)器的供電穩(wěn)定
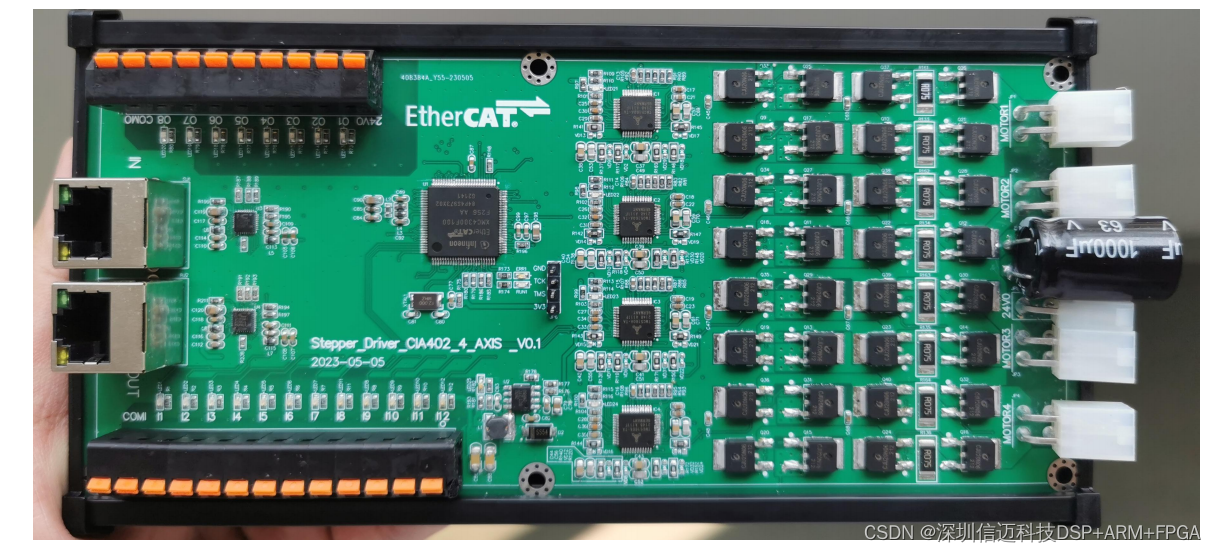
產(chǎn)品尺寸: 90mm*200mm,外殼采用 DIN35 標(biāo)準(zhǔn)導(dǎo)軌。
網(wǎng)口(左中): RJ45 網(wǎng)口直插式,上面為 IN 網(wǎng)口,下面為 OUT 網(wǎng)口。總線
運(yùn)行狀態(tài)指示燈為 RUN1,錯(cuò)誤指示燈為 ERR1。
數(shù)字輸入(左上): COM 口為公共端,I1-I12 為數(shù)字輸入口。COM 口可接地
或者 24V,數(shù)字輸入是雙向出發(fā)的光耦,雙向都可以導(dǎo)通。數(shù)字輸入通道導(dǎo)通時(shí),
對(duì)應(yīng)的綠色指示燈會(huì)亮。
I1-I3
為電機(jī) 1 的數(shù)字輸入,觸發(fā)時(shí),對(duì)應(yīng)總線的輸入對(duì)象字典顯示 1、2、4。
I4-I6
為電機(jī) 2 的數(shù)字輸入,觸發(fā)時(shí),對(duì)應(yīng)總線的輸入對(duì)象字典顯示 1、2、4。
I7-I9
為電機(jī) 3 的數(shù)字輸入,觸發(fā)時(shí),對(duì)應(yīng)總線的輸入對(duì)象字典顯示 1、2、4。
I10-I12 為電機(jī) 4 的數(shù)字輸入,觸發(fā)時(shí),對(duì)應(yīng)總線的輸入對(duì)象字典顯示 1、2、4。
數(shù)字輸出(左下):
O1-O2
為電機(jī) 1 的數(shù)字輸出,對(duì)應(yīng)總線的輸出對(duì)象字典寫入 1、2、4 時(shí)觸發(fā)。
O3-O4
為電機(jī) 2 的數(shù)字輸出,對(duì)應(yīng)總線的輸出對(duì)象字典寫入 1、2、4 時(shí)觸發(fā)。
O5-O6
為電機(jī) 3 的數(shù)字輸出,對(duì)應(yīng)總線的輸出對(duì)象字典寫入 1、2、4 時(shí)觸發(fā)。
O7-O8
為電機(jī) 4 的數(shù)字輸出,對(duì)應(yīng)總線的輸出對(duì)象字典寫入 1、2、4 時(shí)觸發(fā)。
步進(jìn)電機(jī)接線端子(右):
4pin 端子為步進(jìn)電機(jī)端子,自上到下依次為電機(jī) 1、電機(jī) 2、電機(jī) 3、電機(jī) 4。
24V 供電電源端子(右)
不要帶電插拔,否則會(huì)產(chǎn)生電火花。不能放在其它發(fā)熱的設(shè)備旁,要避免粉
塵、油霧、腐蝕性氣體,濕度太大及強(qiáng)振動(dòng)場所,禁止有可燃?xì)怏w和導(dǎo)電灰塵。
為了保證良好的散熱條件,實(shí)際安轉(zhuǎn)中必須盡可能預(yù)留較大安裝間隔,保持通風(fēng)
散熱。 直流驅(qū)動(dòng)器電源不可反接。高壓驅(qū)動(dòng)器內(nèi)有大容量電解電容,即使斷電
后,仍會(huì)保持高壓,斷電后 5 分鐘內(nèi)切勿觸摸驅(qū)動(dòng)器和電機(jī)。
第 5 章 軟件操作
一、放置 XML 文件:
首先找到商家提供的 XML 設(shè)備描述文件,并將其復(fù)制到 TwinCAT
安裝目錄指定文件夾下:C:\TwinCAT\3.1\Config\Io\EtherCAT
Steper_Driver_Cia402_4_AXIS_V1.0.xml
注意:復(fù)制完成后要將 TwinCAT 軟件重新啟動(dòng)
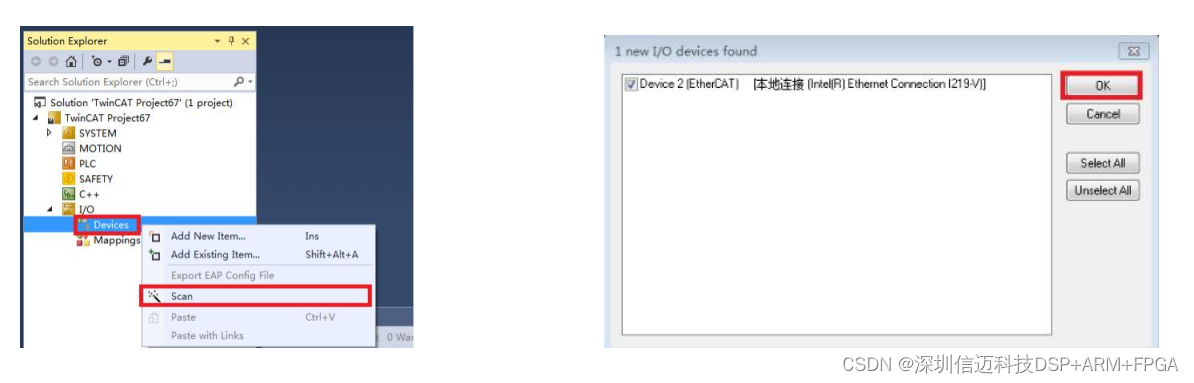
二、啟動(dòng) TwinCAT: 在 TwinCAT 中新建工程。并點(diǎn)擊 Scan 掃描設(shè)備。
按紅框指示依次點(diǎn)擊之后會(huì)出現(xiàn)設(shè)備信息,如下圖所示: