投票活動(dòng)網(wǎng)站怎么做搜索引擎廣告圖片
摘? 要: 社會(huì)經(jīng)濟(jì)的不斷發(fā)展,推動(dòng)了智能化生活的進(jìn)程,智能調(diào)光技術(shù)開(kāi)始廣泛應(yīng)用在生活中,人們也逐漸提高了燈光亮燈率等的要求?;诖?#xff0c;筆者主要設(shè)計(jì)了基于單片機(jī)的 LED 照明燈智能調(diào)光系統(tǒng),希望能夠?yàn)橄嚓P(guān)研究提供一定的參考。
關(guān)鍵詞: 單片機(jī);LED 照明燈;智能調(diào)光系統(tǒng)
0? 引言
我國(guó)的經(jīng)濟(jì)建設(shè)消耗了大量的能源,對(duì)我國(guó)實(shí)現(xiàn)可持續(xù)發(fā)展目標(biāo)造成了非常大的阻礙,所以目前首要解決的就是如何避免能源浪費(fèi)且高效利用能源等問(wèn)題 。日常的燈光照明是現(xiàn)代生活中不可缺少的內(nèi)容,同時(shí)也是能源消耗的重要內(nèi)容,而 LED 燈作為固態(tài)冷燈源,在一定程度上節(jié)約了電能,并具有使用時(shí)間長(zhǎng)和體積小等特點(diǎn),能夠滿足我國(guó)綠色發(fā)展的目標(biāo),因此對(duì)其進(jìn)行研究具有非常大的意義。
1? 單片機(jī)與 LED 調(diào)光方式相關(guān)概述
1.1 單片機(jī)的概念與基本構(gòu)成
單片機(jī)又被稱為單片微型計(jì)算機(jī)( MCU ),在一個(gè)芯片的小型計(jì)算機(jī)中集結(jié)了計(jì)算機(jī)系統(tǒng) [4-5] 。單片機(jī)的主要組成包括控制器、存儲(chǔ)器以及運(yùn)算器等,其與真正的計(jì)算機(jī)相比,缺少了輸入、輸出的相關(guān)設(shè)備,但是在實(shí)際的使用過(guò)程中非常有必要,可以將輸入輸出設(shè)備連接在開(kāi)發(fā)設(shè)計(jì)板中就能做到與普通計(jì)算機(jī)一樣。
單片機(jī)的基本構(gòu)成包括中央處理器 CPU 、隨機(jī)存取存儲(chǔ)器 PAM 、只讀存儲(chǔ)器 ROM 以及中斷系統(tǒng)等。其中,中央處理器的主要作用就是處理數(shù)據(jù),并進(jìn)行復(fù)位、位測(cè)試等相關(guān)操作;隨機(jī)存取存儲(chǔ)器的作用就是保證在存儲(chǔ)系統(tǒng)運(yùn)行的過(guò)程中能產(chǎn)生相關(guān)的數(shù)據(jù)信息;只讀存儲(chǔ)器的作用就是永久性的存儲(chǔ)應(yīng)用程序;中斷系統(tǒng)可以使用編程進(jìn)行控制。
1.2 LED 調(diào)光的方式探討
一般情況下,大功率的 LED 器件具有大電流和低電壓的特點(diǎn),當(dāng)電壓發(fā)生變化時(shí),電流量可能就會(huì)發(fā)生一定的變化,所以在目前市場(chǎng)上比較常用的 LED 照明燈一般是恒流驅(qū)動(dòng)的形式,而且為了能實(shí)現(xiàn)節(jié)能的效果,通常會(huì)通過(guò)調(diào)燈降低 LED 的功耗,有效延長(zhǎng) LED 的使用壽命。 LED 主要的調(diào)光方式包括模擬調(diào)光、PWM 調(diào)光等。其中,模擬調(diào)光的電路相對(duì)比較簡(jiǎn)單,但是不容易精確調(diào)節(jié)輸出電流,且調(diào)光的范圍有限,所以在使用的過(guò)程中還存在一定的問(wèn)題;PWM調(diào)光的效率相對(duì)較高,并且能夠精準(zhǔn)控制,能對(duì)軟件進(jìn)行有效控制,但是使用的成本相對(duì)較高。
2? 基于單片機(jī)的 LED 照明燈智能調(diào)光系統(tǒng)設(shè)計(jì)
2.1 系統(tǒng)總體框架
本文在設(shè)計(jì)時(shí)主要采用了相關(guān)的光電檢測(cè)設(shè)備,通過(guò)ADC0832 進(jìn)行了模數(shù)轉(zhuǎn)換,讓整個(gè)系統(tǒng)能夠根據(jù)周?chē)h(huán)境的實(shí)際光照情況,利用單片機(jī)的芯片對(duì)燈光進(jìn)行直接控制,當(dāng)環(huán)境周?chē)臒艄廨^亮?xí)r,燈光就會(huì)變?nèi)?#xff0c;而當(dāng)周?chē)h(huán)境燈光較暗時(shí),燈就會(huì)變亮,同時(shí)也可以手動(dòng)對(duì)燈光的亮度進(jìn)行控制。圖 1 為基于單片機(jī)的 LED 照明燈智能調(diào)光系統(tǒng)框架。

2.2 系統(tǒng)設(shè)計(jì)的原理
本設(shè)計(jì)中的主控芯片型號(hào)為 STC89C52 單片機(jī),與模數(shù)轉(zhuǎn)換系統(tǒng)相結(jié)合,采集光源的信號(hào)主要通過(guò)光明電阻進(jìn)行,并通過(guò) PWM 調(diào)節(jié)發(fā)光系統(tǒng),同時(shí)對(duì)整個(gè)電路進(jìn)行供電的是5 V 的直流電源。在整個(gè)設(shè)計(jì)的過(guò)程中通過(guò)切換功能模式,能夠讓照明燈在不同的情況下實(shí)現(xiàn)自動(dòng)或手動(dòng)模式切換,有效滿足使用者對(duì)燈光光源強(qiáng)度的需求。
2.3 軟件設(shè)計(jì)
2.3.1 設(shè)計(jì)主程序
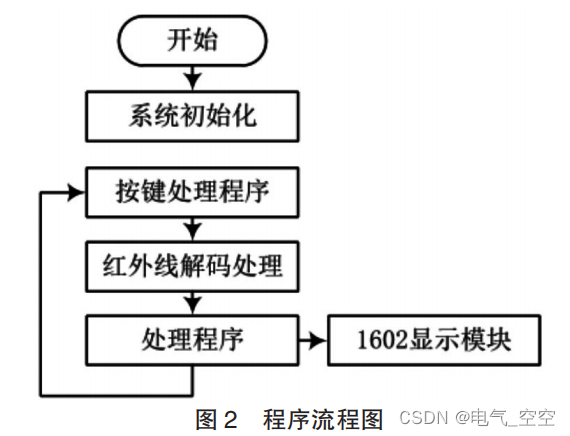
設(shè)計(jì)的主程序中包含 4 個(gè)子程序,分別為紅外處理程序、按鍵處理程序、液晶顯示程序以及 ADC0832 轉(zhuǎn)換程序。其中,紅外處理程序的作用是改變單片機(jī)的輸出模擬量,從而對(duì)LED 燈的光照進(jìn)行控制;按鍵處理程序的功能與紅外處理程序的功能一致;液晶顯示程序就是采集 A/D 轉(zhuǎn)換的數(shù)值,同時(shí)對(duì) PWM 值進(jìn)行采集; ADC0832 轉(zhuǎn)換過(guò)程就是模數(shù)轉(zhuǎn)換光敏電阻采集到的模擬量,然后進(jìn)行傳輸,最終到STC89C52 中。主要的程序流程圖如 2 所示。
2.3.2 設(shè)計(jì)預(yù)設(shè)照度程序
外部中斷 0 與外部中斷 1 的服務(wù)程序構(gòu)成了預(yù)設(shè)照度程序,其對(duì)預(yù)設(shè)的照度值進(jìn)行控制,分別進(jìn)行增加或減少,當(dāng)系統(tǒng)初始化后,會(huì)將初始照度值在變量 L 0 中存儲(chǔ),當(dāng)中斷后,如果按下 K 1 ,就會(huì)觸發(fā) 0 號(hào)的中斷服務(wù),增加 L 0 的值,然后將典型的 I 2 C 總線通信程序調(diào)用出來(lái),在存取器 24C02C中寫(xiě)入L 0 ;如果按下 K 2 ,則會(huì)發(fā)出 1 號(hào)的中斷服務(wù),減少 L 0 值,并會(huì)存入相應(yīng)的存取器中。
2.3.3 照度檢測(cè)程序的相關(guān)設(shè)計(jì)
程序經(jīng)過(guò)初始化的工作并進(jìn)行延時(shí)后,就會(huì)自動(dòng)發(fā)出采集信號(hào),并對(duì)設(shè)備的地址以及讀取的信號(hào)進(jìn)行傳送,按照字節(jié)逐一取出并合并采集到的相關(guān)數(shù)據(jù)信息,最終就能得到環(huán)境中實(shí)際的光照度值。為了能夠保證測(cè)量的準(zhǔn)確性,相關(guān)工作人員還可以進(jìn)行多次采集工作,最終計(jì)算出數(shù)據(jù)平均值,部分 C 源程序經(jīng)過(guò) BH1750 處理的過(guò)程如下:
// 對(duì) BH1750 初始化
void Iiit__BH1750 ()
{
Single__Write__BH1750 ( 0x01 );
}
// 將 BH1750 中的數(shù)據(jù)讀取出來(lái)
對(duì) BH1750 數(shù)據(jù)進(jìn)行讀取
void Red__BH1750 ( void )
{uchar ;
BH1750__Start. ();
// 發(fā)出起始信號(hào)
BH1750__SendByte ( Address+1 );
// 發(fā)送具體的設(shè)備地址;對(duì)信號(hào)進(jìn)行讀取
for ( i=0 ; i < 2 ; i++ )
// 讀取 2 個(gè)及以上的字節(jié)數(shù)據(jù);存儲(chǔ)
{
BUF[i]=BH1750__RecvByte ();
( BUF 表示數(shù)據(jù)存儲(chǔ)數(shù)組)
if ( i=1 )
{
BH1750__SendACK ( 1 );
// 最后一個(gè)數(shù)據(jù)回到 NOACK
}
else
{
BH1750__SendACK ( 0 );
// 回應(yīng) ACK
}
}
BH1750__Stop ();
// 停止信號(hào);
Delay ();
}
3? 模式控制程序的相關(guān)設(shè)計(jì)
3.1 模糊控制
因?yàn)榄h(huán)境光照度會(huì)受到多種因素的影響,比如天氣、窗簾等,這些隨機(jī)且不可預(yù)測(cè)的因素所帶來(lái)的影響是非線性的,所以為了讓人們生活的環(huán)境能夠擁有最適宜的光照度,就可以使用模糊控制對(duì)照明燈光的強(qiáng)度進(jìn)行控制調(diào)節(jié)。模糊控制器能夠處理模糊化,并推理模糊。使用照度對(duì)電路進(jìn)行測(cè)量,能夠得出相對(duì)比較精準(zhǔn)的照度值,并將其作為基礎(chǔ),就能了解控制器的輸出變量值。如果照度值與預(yù)期的照度值之間存在差異,就將其表示為 e ,它們之間存在的變化率就為 ec=de/dt ,模糊化對(duì)應(yīng)的基本領(lǐng)域。得出比較準(zhǔn)確的模糊語(yǔ)言變量后,就將原有的經(jīng)驗(yàn)作為依據(jù)和基礎(chǔ),就能開(kāi)展相應(yīng)的推理工作,得出模糊的控制量 U ,根據(jù)一定的算法公式對(duì) U 進(jìn)行解模糊化,就可以將其轉(zhuǎn)化成可以進(jìn)行精確控制的變量 PWM 信號(hào)占空比,由于不需要嚴(yán)格的數(shù)學(xué)模型中進(jìn)行模糊控制,所以本文設(shè)計(jì)的系統(tǒng)中具有較好的智能控制效果,且具有動(dòng)態(tài)響應(yīng)快、穩(wěn)定性好等特點(diǎn)。
3.2 模糊控制規(guī)則的相關(guān)設(shè)計(jì)
在模糊控制器中,最重要的核心就是模糊控制規(guī)則,模糊控制規(guī)則主要是人們?cè)谘芯空{(diào)光控制過(guò)程中總結(jié)得出的相關(guān)經(jīng)驗(yàn)。比如,在教室、閱覽室等場(chǎng)所中,照明要求的亮度一般在 200 lx 以上,并且不允許超過(guò) 760 lx 。設(shè)控制的基本論域是從 0 到 100 lx ,預(yù)設(shè)的照度值設(shè)為 500 lx ,那么就可以知道可以允許的誤差范圍為 -500 ~ 500 ,誤差的變化率就會(huì)在 [-100 , 100] ,然后會(huì)進(jìn)行以下的處理工作。首先,要模糊化處理相關(guān)的照度值,不斷簡(jiǎn)化相關(guān)的控制,并量化模糊的語(yǔ)言,一般將模糊語(yǔ)言變量分為 7 個(gè)等級(jí),并能得到更加準(zhǔn)確的模糊集合論域,然后使用量化的因素對(duì)其進(jìn)行標(biāo)定,讓其與基本論域相對(duì)應(yīng),進(jìn)行處理的過(guò)程中可按照模糊控制處理方法的基礎(chǔ)開(kāi)展,將模糊語(yǔ)言的變量設(shè)為 E/EU/U ,并選擇三角形的隸屬函數(shù),從而獲得相關(guān)的隸屬值,讓變量模糊化更加精確。其次,需要對(duì)模糊控制的規(guī)則進(jìn)行確定,并且還要進(jìn)行一定的模糊推理工序,模糊控制的規(guī)則一般是由模糊條件的語(yǔ)言所構(gòu)成,其相關(guān)的規(guī)則如圖 3 所示,對(duì) E 和EC進(jìn)行實(shí)時(shí)測(cè)量計(jì)算,并對(duì)模糊控制規(guī)則表進(jìn)行查詢,就能得到最后的模糊輸出量 U 的具體值。

最后,需要進(jìn)行解模糊化工序,讓模糊控制量更加精確,就能夠用于 LED 驅(qū)動(dòng)器中對(duì)其進(jìn)行控制,本文設(shè)計(jì)所采用的算法為加權(quán)平均值法,計(jì)算公式如式(1 )所示,通過(guò)解模糊化控制變量后就能得到更加準(zhǔn)確的控制量 u 。

3.3 模糊控制的相關(guān)程序研究
以照度檢測(cè)程序?yàn)榛A(chǔ),處理好采集到的照度值,如果照度值比給定的最大值還要大,則輸出的 PWM 信號(hào)的占空比為 0 ,就會(huì)關(guān)閉 LED 照明燈。如果照度值比給定的最小值小,則輸出的 PWM 信號(hào)的占空比為 1 ,這時(shí) LED 照明燈會(huì)按照額定的最大值進(jìn)行工作。如果其相等于設(shè)定的相關(guān)照度值,就說(shuō)明程序中的相關(guān)信號(hào)占空比與原來(lái)一樣,以上描述的都是特殊值,而在這些特殊值外還有一些標(biāo)準(zhǔn)值,它們都必須按照相關(guān)的算法標(biāo)準(zhǔn)進(jìn)行計(jì)算,并查詢相關(guān)的模糊控制表,最終得出比較準(zhǔn)確的模糊輸出量,然后再求出占空比,最后將 PWM 信號(hào)通過(guò)單片機(jī)輸出,控制相關(guān)的驅(qū)動(dòng)電路,從而實(shí)現(xiàn)對(duì) LED 照明燈光強(qiáng)度調(diào)節(jié)的目標(biāo)。
4? 系統(tǒng)的調(diào)試情況研究
在實(shí)驗(yàn)室內(nèi)模擬測(cè)試設(shè)計(jì)的系統(tǒng),對(duì)系統(tǒng)的可靠性和準(zhǔn)確性進(jìn)行驗(yàn)證,通過(guò)相關(guān)的仿真實(shí)驗(yàn)可以知道,本文設(shè)計(jì)的LED 照明燈智能調(diào)光系統(tǒng)感知環(huán)境照度的反應(yīng)較快,并且單片機(jī)控制輸出占比、處理數(shù)據(jù)相對(duì)比較穩(wěn)定,LED 照明燈不僅能夠自動(dòng)調(diào)控,還可以手動(dòng)完成控制,說(shuō)明設(shè)計(jì)的該類(lèi)系統(tǒng)與預(yù)期功能的要求相符。本文所使用的照度傳感器的精度相對(duì)較高,能夠精確檢測(cè)環(huán)境的照度,并且在存儲(chǔ)器件內(nèi)的環(huán)境照度值等能滿足各種照度環(huán)境的要求;利用模糊控制的短發(fā),能夠讓照明燈進(jìn)行智能調(diào)光工作,讓其根據(jù)環(huán)境照度的變化而變化,讓調(diào)光更加準(zhǔn)確,但是在系統(tǒng)中使用的傳感器精度相對(duì)較高,所以支出的成本也比較高,并且模糊控制還是以經(jīng)驗(yàn)為基礎(chǔ),導(dǎo)致調(diào)節(jié)更加負(fù)雜,所以還需要相關(guān)學(xué)者進(jìn)行更加深入的研究,積極解決目前該系統(tǒng)中還存在的響應(yīng)速度慢以及反復(fù)采集環(huán)境照度等問(wèn)題,并降低系統(tǒng)的成本,使其既經(jīng)濟(jì)又實(shí)惠。
5? 結(jié)? 語(yǔ)
在現(xiàn)代化社會(huì)的不斷發(fā)展過(guò)程中,出現(xiàn)基于單片機(jī)的LED 照明燈智能調(diào)光系統(tǒng)是必然趨勢(shì),其不僅能夠滿足人們的照明需求,還能節(jié)約大量的電能,能幫助我國(guó)實(shí)現(xiàn)可持續(xù)發(fā)展的目標(biāo),具有非常大的應(yīng)用價(jià)值。