中國(guó)人民銀行網(wǎng)站查詢網(wǎng)址網(wǎng)站快速排名的方法
1. 啟動(dòng)ros 主節(jié)點(diǎn) roscore
roscore
運(yùn)行成功如圖:
1.1 rosrun 啟動(dòng)服務(wù)節(jié)點(diǎn)
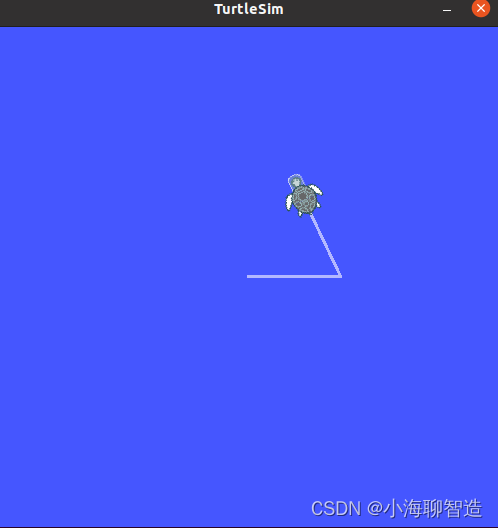
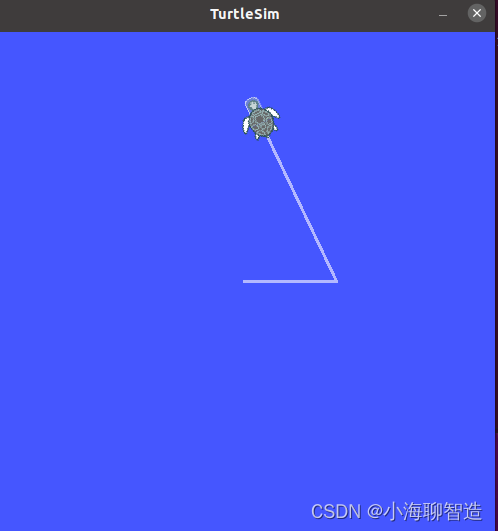
例子:啟動(dòng)一個(gè)小烏龜節(jié)點(diǎn)
rosrun turtlesim turtlesim_node
運(yùn)行結(jié)果如圖:
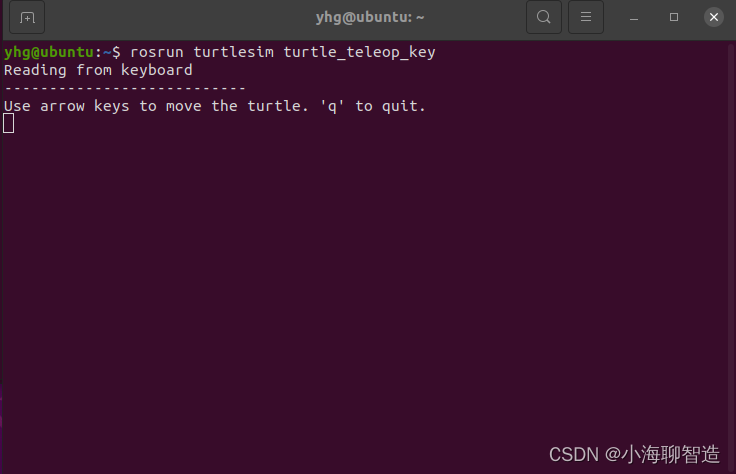
1.2 啟動(dòng)鍵盤(pán)控制
打開(kāi)新的命令窗口,啟動(dòng)turtle_teleop_key 節(jié)點(diǎn)
rosrun turtlesim turtle_teleop_key
運(yùn)行結(jié)果:
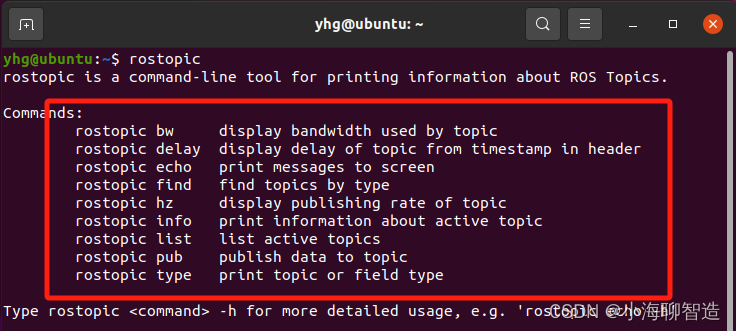
2. 顯示系統(tǒng)中所有與話題相關(guān)消息的指令rostopic
rostopic
列出rostopic 所有的命令列表,如下圖
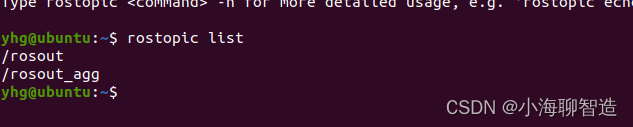
我們先看下 list 列出所有當(dāng)前在用的消息列表,可以看到,只有兩個(gè)
2.1 打印出當(dāng)前所有服務(wù)的列表
roctopic list
2.2 rostopic pub 話題名 話題消息類型 話題消息內(nèi)容 #向話題發(fā)布內(nèi)容 輸入話題名后可以使用Tab補(bǔ)齊
例子: 讓小烏龜動(dòng)起來(lái)
小技巧:輸入命令的時(shí)候可按 Tab 建將命令自動(dòng)補(bǔ)全,將消息類型補(bǔ)全后可雙擊 Tab 建將消息補(bǔ)全
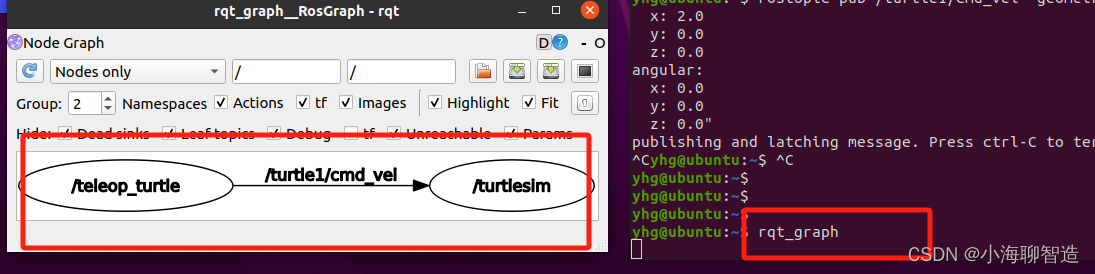
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:x: 2.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 0.0"
運(yùn)行效果自己查看:
2.3rostopic pub -r 頻率 話題名 話題消息類型 話題消息內(nèi)容 #-r:信號(hào)發(fā)布 頻率:一分鐘發(fā)布的次數(shù)
2.4 rostopic type 查看消息的類型
例子:
rostopic tyle /turtle1/cmd_vel

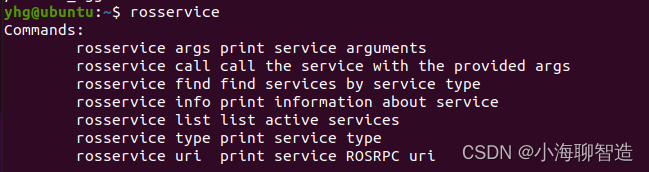
3.rosservice:顯示系統(tǒng)中所有與服務(wù)相關(guān)消息的指令
同樣的先看下 rosservice 下所有的命令列表
rosservice
3.1 打印出當(dāng)前所有服務(wù)的列表rosservice list
rosservice list

3.2 rosservice call 服務(wù)名 服務(wù)內(nèi)容 #調(diào)用服務(wù)
例子: 清除小烏龜運(yùn)行軌跡
rosservice call clean

4. rosnode:顯示系統(tǒng)中所有與節(jié)點(diǎn)相關(guān)消息的指令
rosnode
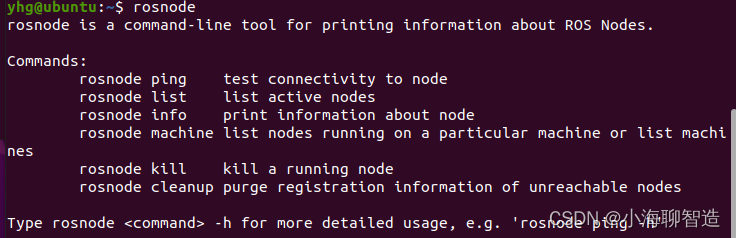
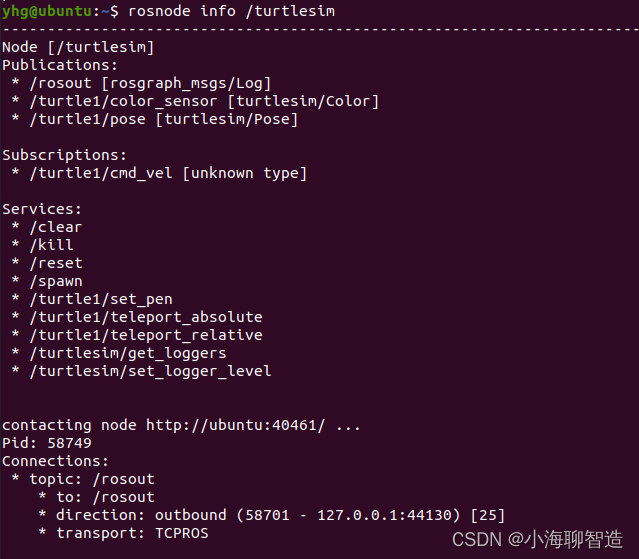
###4.1 rosnode info /xxx #查看xxx節(jié)點(diǎn)信息
例子: 查看小烏龜節(jié)點(diǎn)信息
rosnode turtlesim turtlesim_node
運(yùn)行結(jié)果如下圖:
5 .rosmsg:顯示系統(tǒng)中所有與消息相關(guān)消息的指令
5.1 rosmsg show xxx #顯示xxx的數(shù)據(jù)結(jié)構(gòu)
6.rosparam::顯示系統(tǒng)中所有與參數(shù)相關(guān)消息的指令
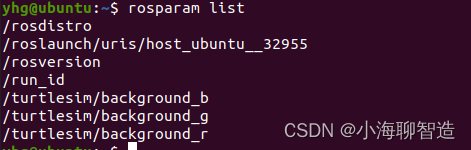
6.1 rosparam list #列出當(dāng)前所有參數(shù)
rosparam list
運(yùn)行結(jié)果如下:
6.2 rosparam get xxx #顯示某個(gè)參數(shù)值
6.2.1 顯示服務(wù)上所有參數(shù)內(nèi)容
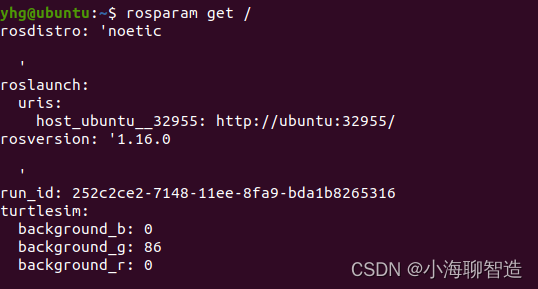
6.2.2例子:設(shè)置小烏龜節(jié)點(diǎn)窗口的顏色
R(紅)G(綠)B(藍(lán))這三原色

6.3 rosparam set xxx #設(shè)置某個(gè)參數(shù)值
例子:設(shè)置小烏龜節(jié)點(diǎn)窗口的顏色為綠色
rosparam set /turtlesim/background_r 0
rosparam set /turtlesim/background_b 0
rosservice call clear

rosservice call clear 促使上面的修改生效
6.4 rosparam dump xxx.xxx #保存參數(shù)到文件
6.4.1 例子:將所有參數(shù)寫(xiě)入到文件中
rosparam dump params.yaml
6.5 rosparam load xxx.xxx #從文件讀取參數(shù)
6.5.1例子:將參數(shù)文件導(dǎo)入到服務(wù)中
rosparam load params.yaml namespace
6.6 rosparam delete xxx #刪除參數(shù)
7 .rqt_graph:用圖形表示當(dāng)前活動(dòng)中的節(jié)點(diǎn)與在ROS網(wǎng)絡(luò)上傳輸?shù)南⒅g的相關(guān)性的工具