網(wǎng)站制作公司哪兒濟(jì)南興田德潤(rùn)有活動(dòng)嗎微信軟文模板
ROS機(jī)器人編程
ROS中的核心概念
ROS的通信機(jī)制
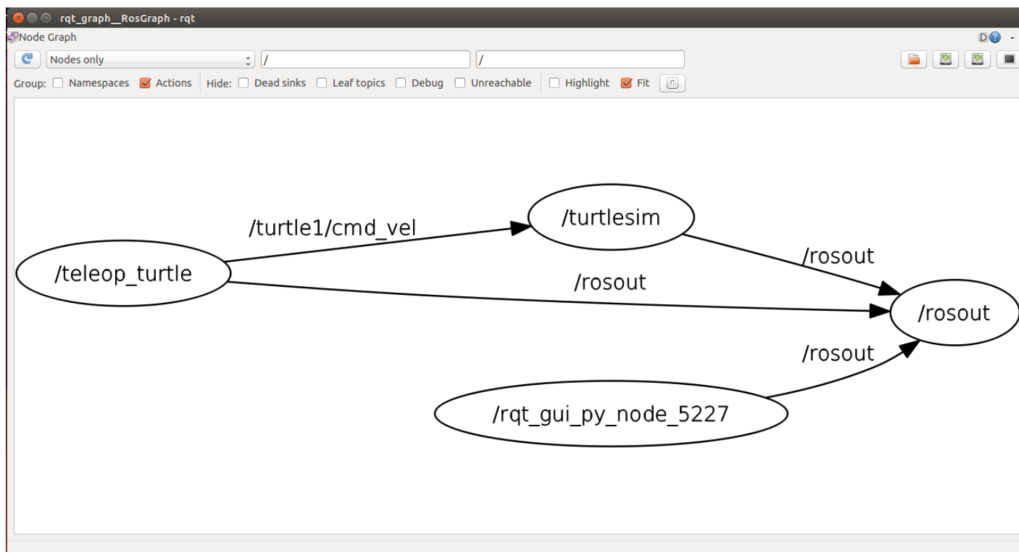
在ROS中結(jié)點(diǎn)是最小單元,比如說(shuō)機(jī)器人的遙控器可以作為一個(gè)控制結(jié)點(diǎn),機(jī)器人上的攝像頭也可以看作一個(gè)結(jié)點(diǎn),ROS通過(guò)協(xié)調(diào)各個(gè)結(jié)點(diǎn)來(lái)實(shí)現(xiàn)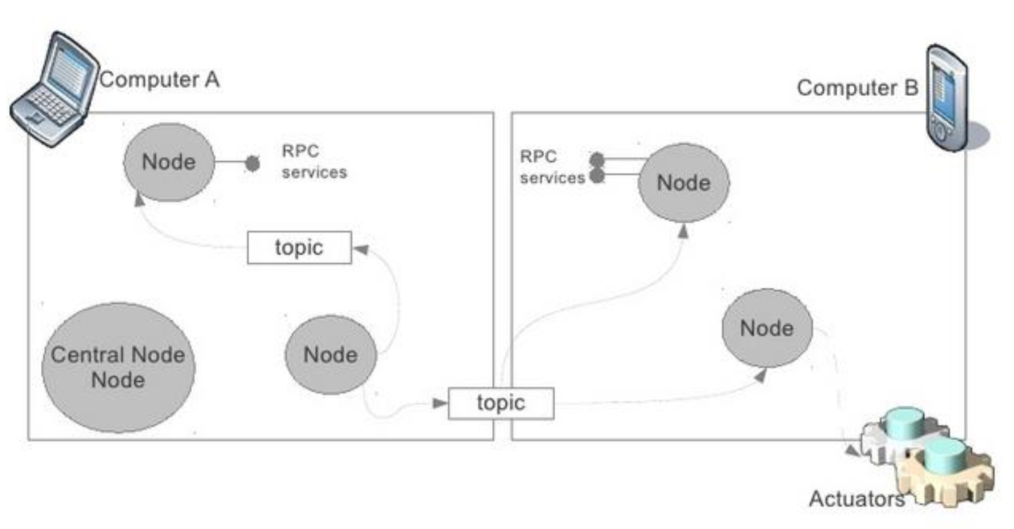
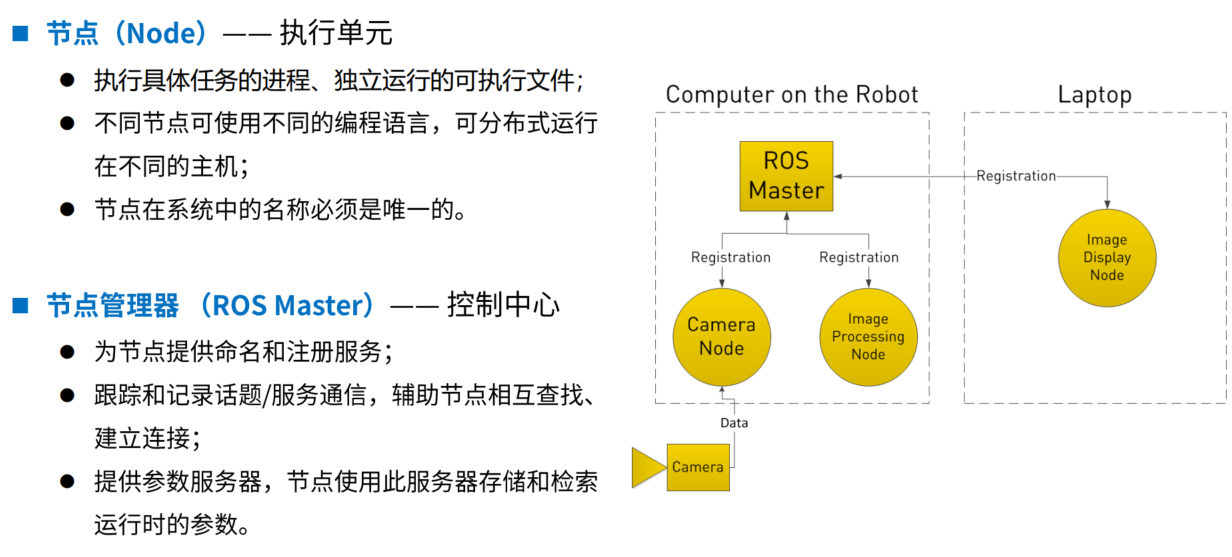
在啟動(dòng)任何ROS結(jié)點(diǎn)之前,都必須先啟動(dòng)ROS Master
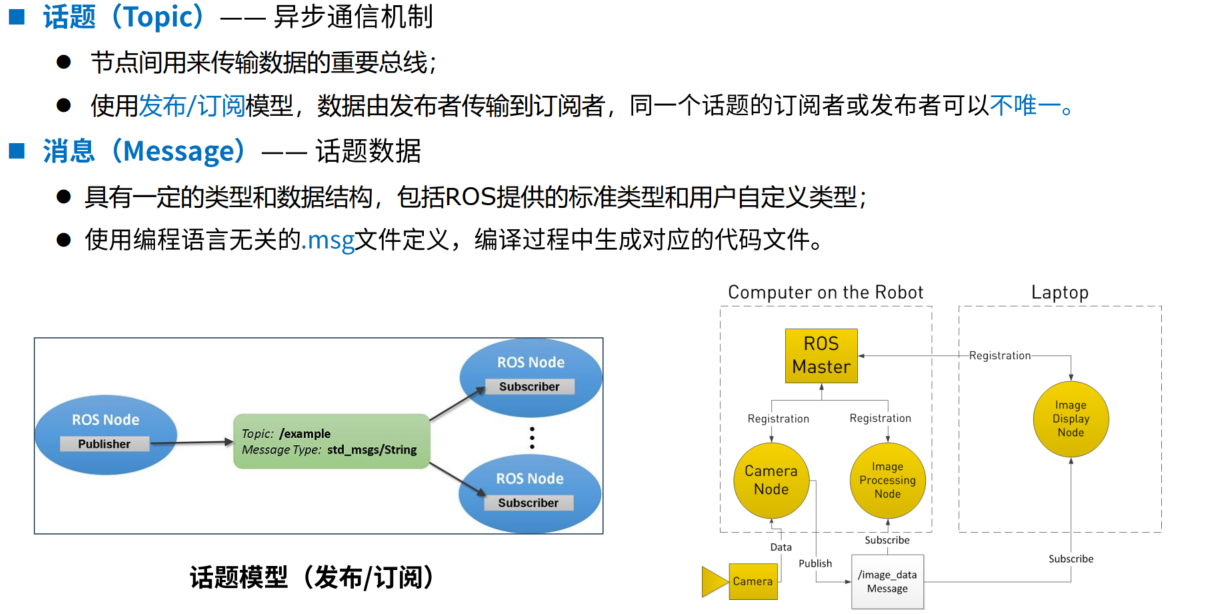
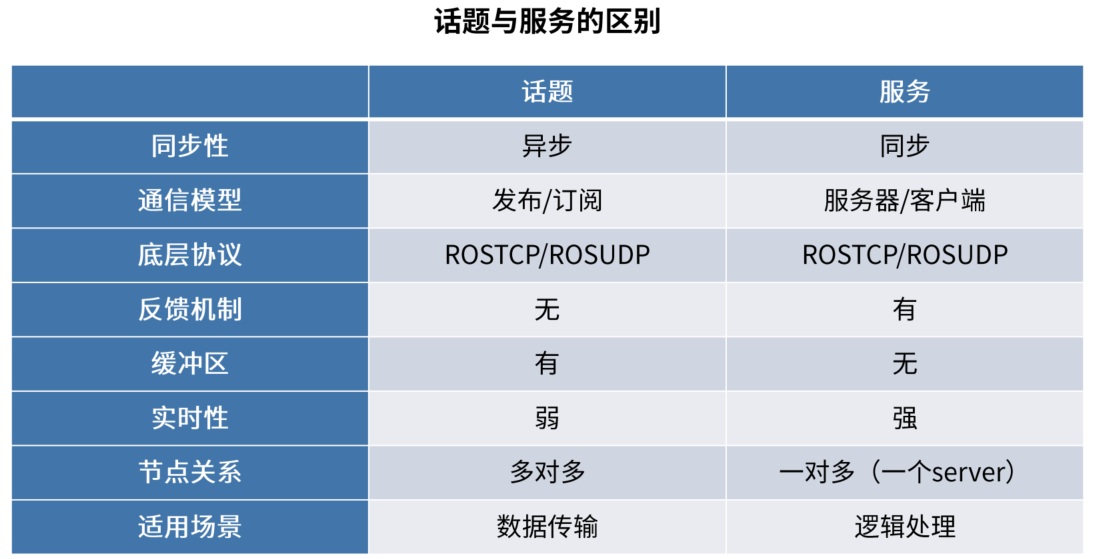
話題通信
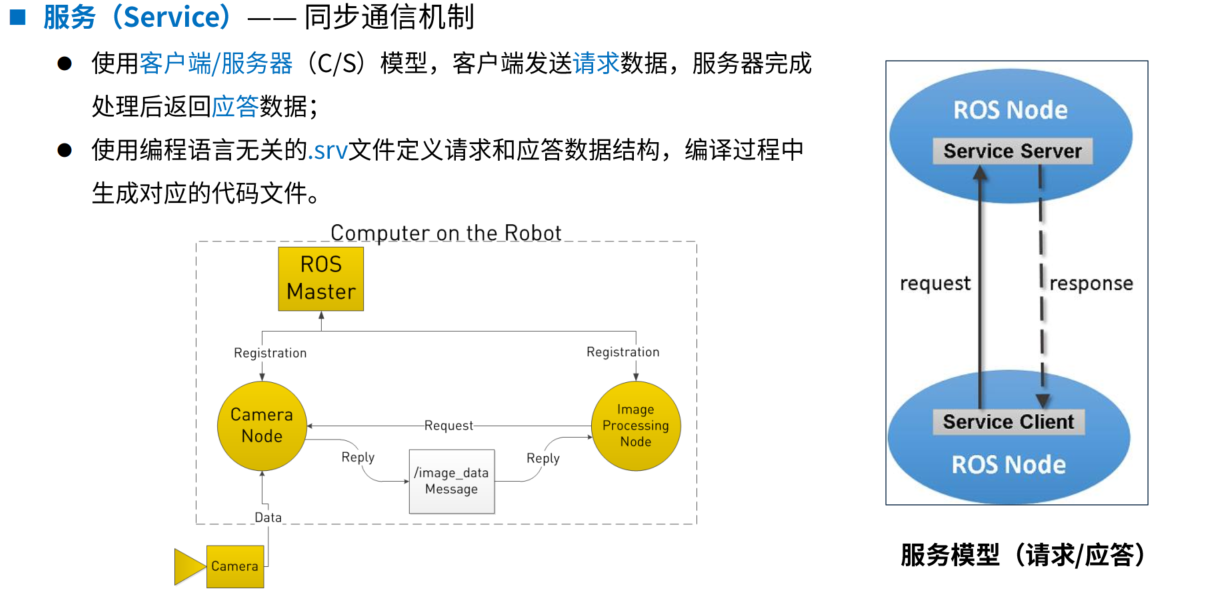
服務(wù)器客戶端通信
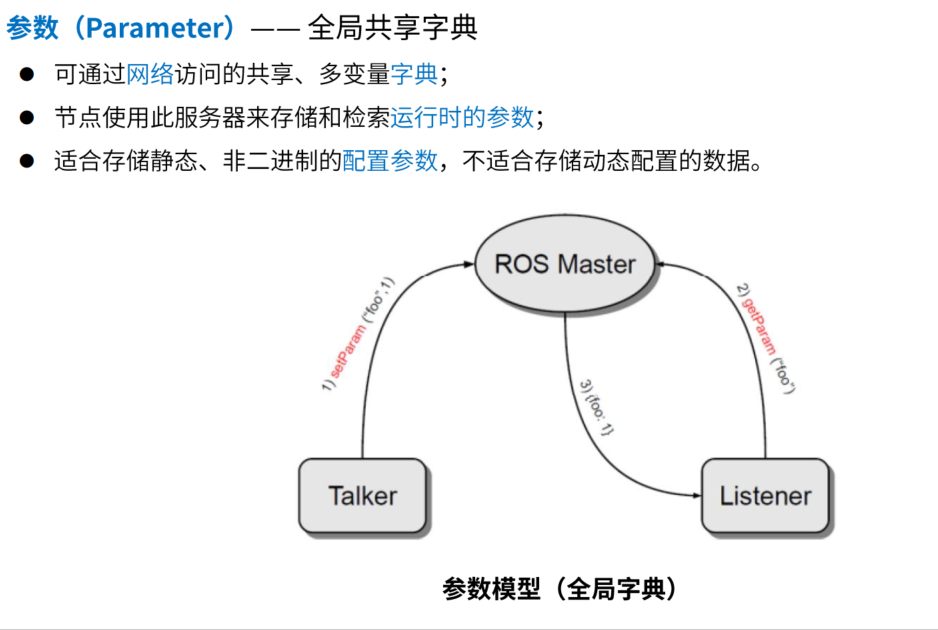
全局參數(shù)
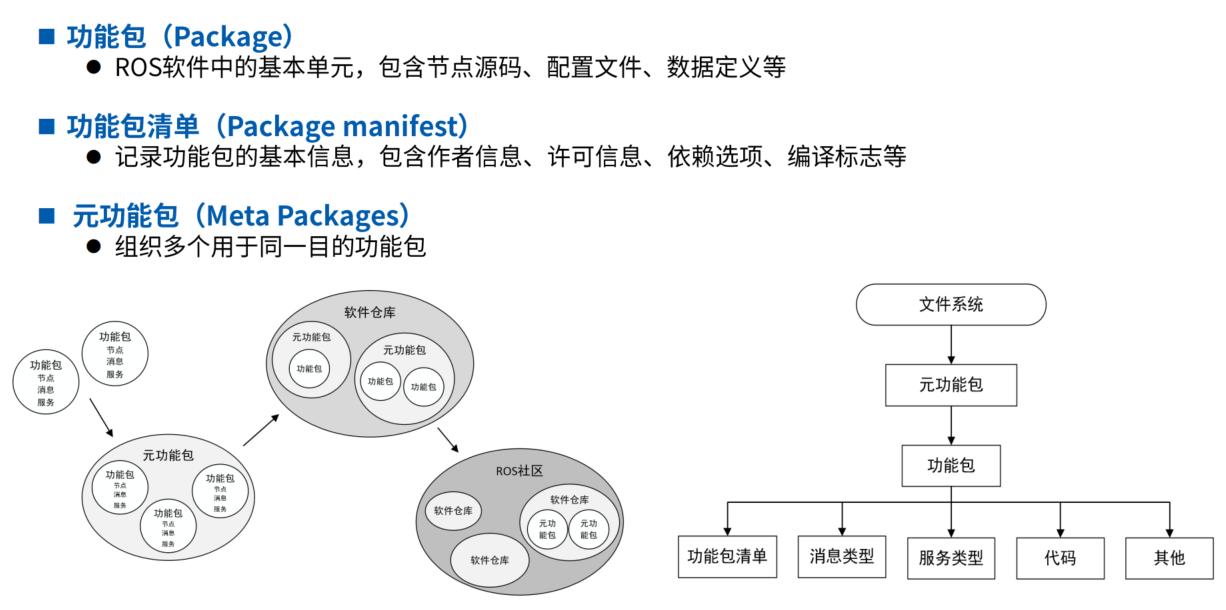
文件系統(tǒng)
ROS中的命令行工具
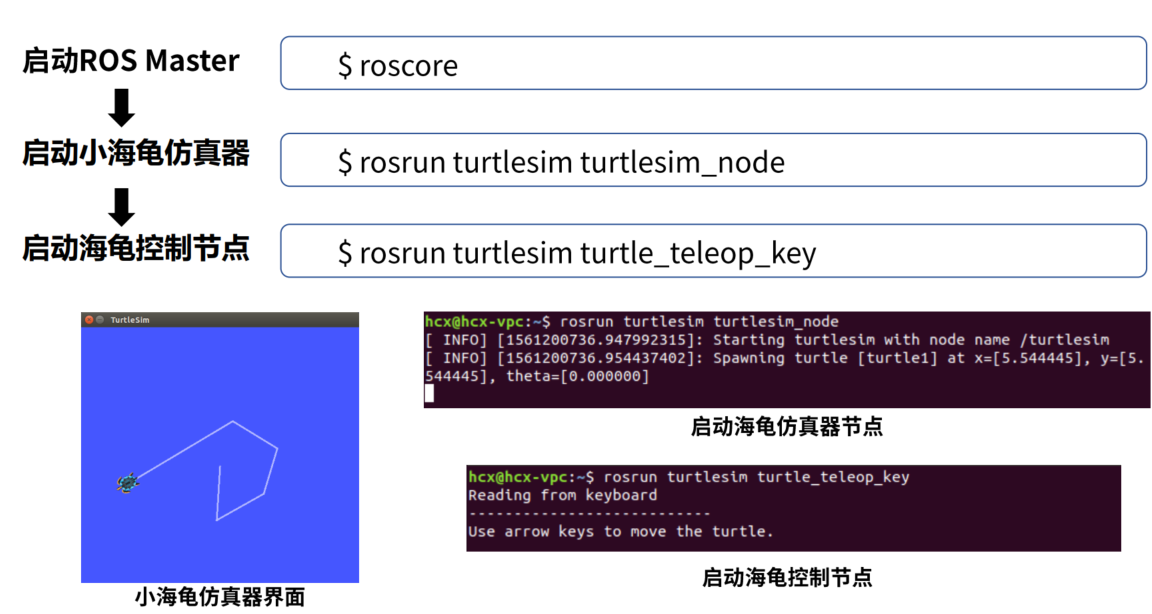
以小海龜為例子
查看話題列表
rosnode list
發(fā)布話題消息
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist"linear:x:1.0y:0.0z:0.0angular:x:0.0y:0.0z:0.0"
發(fā)布服務(wù)請(qǐng)求
rosservice call /spawn "x:5.0"y:5.0theta:0.0name:'turtle2'"